Java 9 引入的 Memory Order
从 Java 9 开始,jdk 中提供了一个全新的类用于部分替代原本
Unsafe 所承担的偏底层的工作,即
java.lang.invoke.VarHandle。
新颖的是,在 VarHandle 中定义了对变量以不同的 Memory
Order 来进行访问的几种模式:
Plain,Opaque,Acquire/Release,Volatile
通过这几种不同的模式,在无锁编程(lock-free)中能够更灵活的控制对共享变量的操作,也能基于此更细致的进行设计从而提升程序的性能。
那么,该如何理解 VarHandle 、Memory Order、lock-free
这些概念之间的关系呢?接下来我们会从底层说起,一步步将他们串起来。
CPU 缓存的麻烦
通常 CPU 是无法直接访问内存的,物理结构上,CPU 和内存之间,还隔着一层缓存(Cache)。缓存的目的与我们在应用服务与数据库之间隔一层缓存的目的一样:CPU 和内存的速度差距太大了。而且为了能平滑连接高速设备与低速设备,缓存层通常会分出 L1 L2 L3 层,容量逐层递增,访问速度逐层递减,最后才是内存、硬盘,整体结构像一座金字塔。
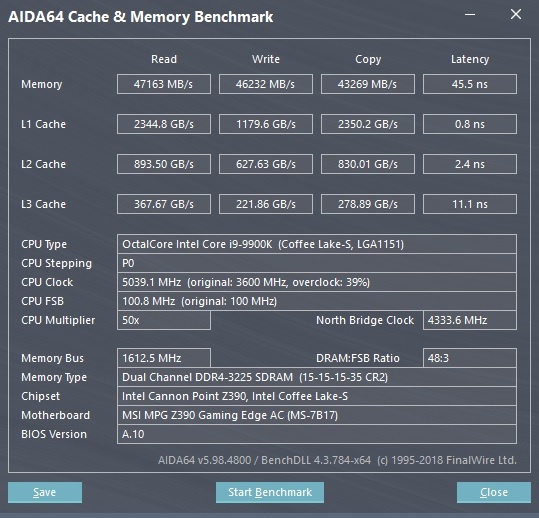
上面这幅图(来源)展示了缓存与内存的速度对比,可以看到,L1 Cache 的 latency 只有 0.8ns,而 Memory 有 45.5ns,速度相差 57 倍之多,试想如果 CPU 直接与 Memory 交互,整个世界估计都会变慢。
古早的缓存结构
早先的 CPU,只有一个核心,也只有一个缓存,呈现如下的结构:
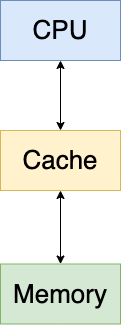
对于这种结构而言,Cache 的使用非常简单:读写都优先通过缓存。
读的时候:
- 假如缓存中恰好有需要的数据(Cache Hit)则直接返回
- 假如没有需要的数据(Cache Miss)则继续向下,从 Memory 中读取
写的时候:
- 先写入缓存,再继续向下写入 Memory。这种同步更新的策略叫 Write-Through。这种策略简单,并且能保证在任何时间里,Cache 与 Memory 的数据都是最新的,但缺点是同步操作很慢。
- 先写入缓存,并标记 dirty,之后异步的进行 "flush"。这种异步更新的策略叫 Write-Back。这种策略能极大地提升性能,但 Cache 与 Memory 之间存在一段时间的不一致,有点类似最终一致性。
但无论如何,在这种简单的架构下,不同的线程只是分享了 CPU 不同的时间片,线程与线程间的共享资源同一时刻只可能有一个线程进行访问,能确保资源对所有线程完全可见。
真并行 - 多核
事情不会像上一节那么简单的,因为实际上如今的 CPU 都是多核。多核意味着同一时刻可以有多个任务真正并行的执行,对上一节的架构进行扩展,我们可以得到:
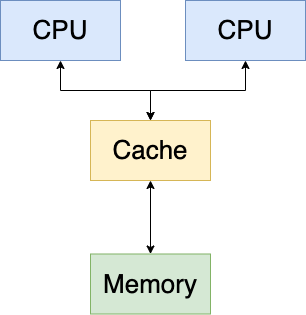
对于这种架构,我们必须要限制 CPU 对 Cache 的访问:同一时刻只能有一个 core 访问 Cache,否则就会产生并发修改,出现不一致,导致程序的结果不可预知。
然而这样做,似乎失去了多核存在的意义,由于缓存的限制,多个核心在读写指令上被强制串行化了,这就好像给读写指令加了一把独占锁,导致性能很差。
CPU 核私有缓存
如果不能同时访问同一个 Cache,那么我们索性将 Cache 拆分开,给每个 core 都分配一块缓存:
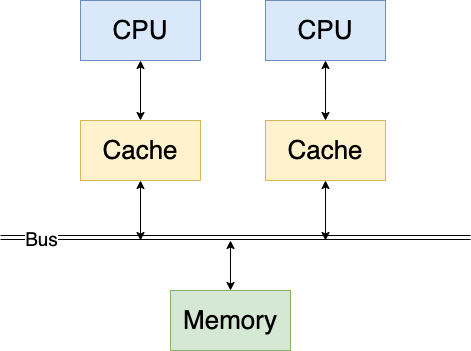
这样每个 core 都能愉快的与自己私有的 Cache 通信,而 Cache 与 Memory 之间通过一条总线连接。有了私有缓存,CPU 不同 core 之间不再需要互相等待了,因此能够高效的并行执行程序。
但同时问题也来了:假如 core 1 在自己的缓存里保存了共享变量
a = 1,并且对其进行 +1 操作,那么在 core 1
的视角来看,现在a = 2。这时候,core 2 也想执行同样的
+1 操作,由于 core 2 对 a
的读取没有命中,因此从 Memory 中读取出 a = 1,之后也执行了
a = a+1 。这种情况下,假如 core 2 的缓存优先回写到了 Memory
中,那么 core 1 的更新操作就丢失了。
上述问题在我们日常编程当中经常遇到,解决的办法通常是加锁,通过牺牲一定的效率来确保正确性。那么在 CPU 中呢?
也一样,在这种缓存架构下,为了保证数据的正确性,提出了缓存一致性协议(Cache Coherence)来解决问题。
Cache Coherence
通常,缓存一致性协议分两类:
- Snoopy 嗅探协议:每个 Cache 上产生的任何操作,都会在总线中广播,而其他 Cache 可以嗅探总线上的消息,从而做出反应
- Directory 目录协议:Snoopy 协议由于有大量的广播消息占用总线,在 core 数量 > 8~16 时会产生严重拥堵。基于目录的协议是选择某一个 core 作为 host,来通过一张目录表保存当前缓存内容的全局状态。但基于目录的协议开销大,速度慢。
MESI
MESI 协议是一种经典的 Snoopy 一致性协议,他给所有缓存中保存的值(这里的值指的是以缓存行Cache Line为单位)都指定了状态,共有四种:
Invalid:处于该状态下的数据要么在 Cache 中不存在,要么是存在但已经过期。Invalid 的数据会被 Cache 直接忽略。
Shared:处于该状态下的数据是对 Memory 中数据的干净拷贝(clean copy)。Shared 的数据可以被多个 Cache 所拥有,但只可读,不可写。
Exclusive:处于该状态的数据也是对 Memory 中数据的干净拷贝,但与 Shared 不同的是,Exclusive 下的数据,一定只会被某一个 core 独占。而假如其他 Cache 中可能存在相同的数据,那么当它被某个 core 独占后,其他相同的数据都会变成 Invalid。
Modified:该状态标记的数据是脏数据(dirty)。表明数据在 Cache 内被修改,与 Exclusive 一样,任何与之相同的数据,都会变为 Invalid。此外,Modified 的数据必须在失效之前被写回 Memory。
与单核单缓存 write-back 策略的架构比较,我们发现,I、S、M 状态都能找到相应映射,而 MESI 的独特之处就在于 E 状态。Exclusive 解决了某个 Cache 在需要修改数据之前需要先通知其他 Cache 的问题:当数据处于 E 或 M 时,表明当前的这份数据是唯一有效的,那么我们就能大胆的对其进行修改了。
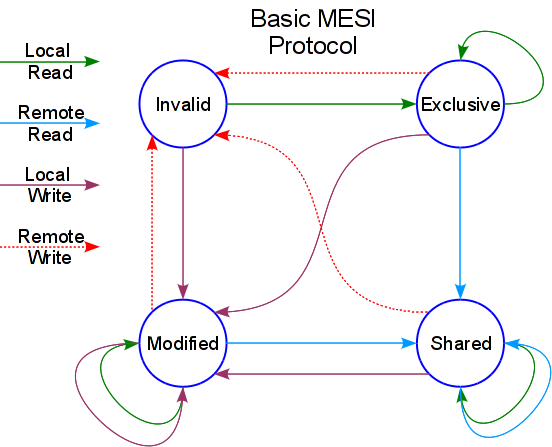
从上面的状态图(图源)中我们可以看到:
- 初始状态下,内存地址映射到 Cache 的数据(Cache Line)的状态是 Invalid,当任一 core 1 对该地址进行读取后,状态转至 Exclusive。如果这时有另一个 core 2 对相同地址发起读请求,则 core 1 嗅探到请求后,会复制数据给 core 2,此时两个 Cache 中的数据状态都变为 Shard。
- 假如 core 1 想要对某初始状态的数据进行修改,则状态会从 Invalid 转至 Modified。假如这时 core 2 想读取该数据,则 core 1 会先将数据 Write-Back,然后复制一份交给 core 2,状态此时变为 Shard。
- 但如果 2 中的 core 2 不是读,而是想要修改,那么 core 1 也会先拦截 core 2 的这一动作,将数据 Write-Back,之后将数据状态改为 Invalid。之后 core 2 就可以以正常的流程来修改数据。
从 MESI 的定义上看,只要 Cache 之间能遵循协议要求,及时的将操作进行广播,并及时的对总线上发生的事件进行响应,那么就能实现多核 CPU 对多个私有缓存操作的顺序一致性(Sequential Consistency)
还是不够快
从前一节我们知道,Cache 之间能够通过一致性协议如 MESI 来确保数据不会被错误的并发修改,那么我们更进一步思考,以 MESI 为例,为了确保顺序一致性:
- 所有 Cache 都必须能立即对总线中发生的事件进行响应
- CPU 完全按照程序指令,尽职的将内存操作事件进行广播,并且等待一条指令执行完毕后,再执行下一条
我们当然可以想办法允许 Cache 和 CPU 满足上述条件,但:
- Cache 可能正在执行其他工作,无法及时响应事件,导致 Cache 之间为了需要相互等待
- CPU 对 Cache 的操作实际上是一种 IO 操作,那么为了逐条执行指令,这种 IO 操作的指令也必须等待
各种各样的等待导致 CPU 的整体效率还是不够高,处理速度还是不够快。
如果不采取等待的策略,那么:
- 对于 Cache 的写操作,即 store 操作,相比 load
操作要复杂一些,是一个两阶段的过程:首先想要 store 的 core 必须先拿到
Exclusive 状态的所有权(发出 invalid event,并确保收到其他 core 返回的
invalid response),之后再进行写入动作。
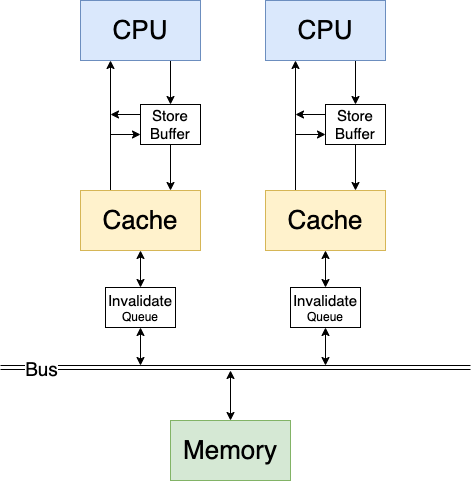
- 第一步涉及到一个与其他 core 协商的过程。协商需要等待,因此为了性能考虑,将等待协商的写操作也放入一个队列中,直到可以开始写为止。因此我们需要在 Cache 中增加一个 Store Buffer。
- 进入 store buffer 的数据被认为已经写入成功了,但当 CPU 想要读取刚刚写入的数据时,Cache 里面可能还没有,所以重新进行设计,让 CPU 可以直接从 store buffer 读取数据,这种设计称为 store forwarding
- CPU 无需等待 IO
操作完成,而是在这段时间里执行其他的操作以至于不会浪费周期进行空转。这样的话,从指令执行的角度看,CPU
的执行顺序,可能会与程序指令顺序不一致,即乱序执行。
- 有些情况下我们需要防止这种乱序执行,因此需要通过 memory barrier 来使写入有序,那么,在 barrier 之后的写操作,无论是不是 Shared 状态(不是就不需要和其他 core 协商,可以直接写 Cache),都需要按顺序写入 store buffer 中
- 如果 store buffer 中积攒的待协商写请求太多,又会导致 store buffer 被占满,而 store buffer 积压的主要原因就是每个 core 的 Cache 都需要将自己对应的数据进行 invalid,之后再发出 invalid response,这在 Cache 繁忙时就太慢了。所以,考虑 Cache 可以将接收到的 Invalidation 事件通过一个队列保存,然后就发出 invalid response,并在 Cache 空闲后一一处理。那么就需要在 Cache 中增加一个 Invalidation Queue
最后,我们的 CPU 缓存架构变成了这样:
CPU 实在太快了
指令重排
Memory reordering
从前文中我们能够知道,CPU 通过操作缓存来优化性能,而为了保持缓存间的一致性,需要通过类似 MESI 的一致性协议来确保缓存中不存在错误的数据。
但是由于 Invalidation Queue 与 Store Buffer 的影响,有些时候:
- 如果在 Invalidation Queue 中暂存的失效事件,被 Cache 响应之前,受影响的数据又被 CPU 读取,导致读到了过期的数据
- 由于 Store Buffer 的存在,Store 的真实执行时间也许会比看起来要晚
由于上述可能发生的场景,导致真实的执行顺序看起来与指令顺序不一致。
Compiler Reordering
通常,在程序编译阶段,编译器也会做出大量的优化,其中就包括了对语句的简化,其简化的主要手段就是对相互不依赖的语句进行优化。
比如,对于语句
a = 1; b = 2; x = a + b;而言,第三条语句依赖前两条语句的结果,因此他一定要在前两条语句之后执行,才能保证程序的正确性。但对于互相之间没有依赖的语句,就可以随意的进行重排、合并、省略等等操作了,因为他们不会影响到最终程序执行的结果,例如:
1 | a := p.x |
可能会被优化为:
1 | a := p.x |
但是编译器的优化都只针对单线程程序,多线程程序之间的依赖性,编译器难以获悉。因此假如上述程序的实际执行是这样的:
1 | thread-1: | thread-2: |
那么如果还是按照前面的办法进行优化
b := a,则真实程序的执行顺序看起来就会像是
p.x = p.x + 1 在 b := p.x 之后才执行。
CPU Reordering
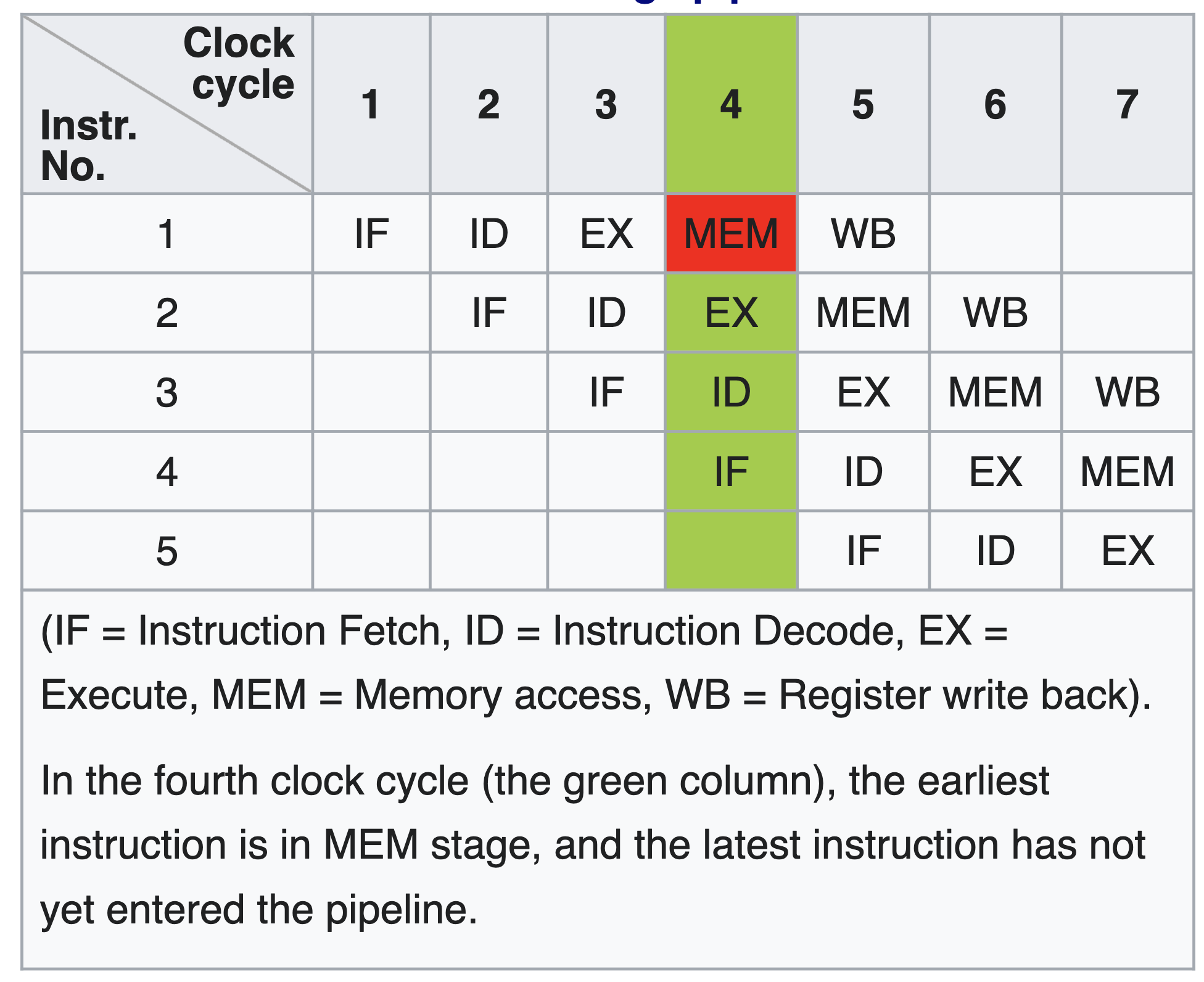
我们都知道现代 CPU 在执行指令时,是以指令流水线的模式来运行的。由于执行每一条指令的过程,都可以大致分解为如下阶段:
取指(Fetch,IF)、译码(Decode,ID)、执行(Execute,EX)、存取(Memory,MEM)、写回(Write-Back, WB)
在 CPU 中不同的执行阶段会涉及到不同的功能部件,那么只要我们将指令阶段拆分开,尽量让每一个部件都不空闲的持续运行,就能使性能达到最优:
但现实并不总是我们期望的,假如当出现相互依赖的指令时,例如上述的例子:
a = 1; b = 2; x = a + b;,由于 x = a + b
依赖于 a 与 b
的加载,那么当该指令在流水线中执行时,发现它依赖的数据还没有准备好,就会将流水线中断,中断会导致流水线中所有的环节开始等待,很影响性能。
因此,既然要等待,我们不如将等待的时间用来执行其他的指令,这样就能最大化的减少中断。指令重排序就能实现这一目的。
Memory Barries
上一节提到的各个层面的 Reordering,的确能够对性能提升起到极大的帮助,但同时也带来了很多问题。
在多线程场景下,线程间如果存在对共享变量的操作,那么无论是在编译器层面、CPU 层面还是 Cache 层面,如果不做特殊处理,它们都无法保证程序的正确性。
基于此,Memory Barrier 的概念被引入。
Memory Barrier(也称 Memory Fence)是一类 CPU 指令,它能够影响编译器的编译和 CPU 的执行,使得所有在 Memory Barrier 之后的指令,一定不会在 Barrier 之前执行。因此可以认为,Memory Barrier 的引入,能够抑制所有编译器、CPU 以及其他设备的各种优化手段,包括重排序、内存操作的延迟和组合、预测执行、分支预测等等技术。Memory Barrier 能让 CPU 老老实实的按指令顺序执行,当然也就导致了性能的下降,因此通常只有在不得已的情况下才会使用它。
如下几种 Memory Barriers(来自 Linux Kernel 对 Memory Barriers 的定义):
Write (or store) memory barriers:
只作用于 store 指令。确保所有在 barrier 之前的 store 操作在所有 barrier 之后的 store 操作之前发生(happen before)。
从 CPU 的角度看,在所有 barrier 之前的 store 将数据存入内存之后,barrier 后面的 store 才会开始执行。
Write memory barrier 通常会与后面将会提到的 Read、Data Dependency barrier 一同使用。
Data dependency barriers:
- 两个有依赖关系的 load 操作,barrier 之前的 load 会在之后的 load 之前发生。
- 在单 CPU 内相互依赖的 load 似乎没有必要加 barrier,但由于 Invalidation Queue 和 Store Buffer 导致缓存一致性协议只能保证最终一致性,因此其他 CPU 的 Cache 可能会先感知到后面的 load,再感知到前面的 load,导致程序错误。
Read (or load) memory barriers:
- 只作用于 load 指令。确保所有在 barrier 之前的 load 操作在所有 barrier 之后的 load 操作之前发生(happen before)。
- Read barrier 隐含了 data dependency barrier。
General memory barriers:
- 确保所有在 barrier 之前的 load/store 操作在所有 barrier 之后的 load/store 操作之前发生(happen before)。
- 是最强的 barrier,它隐含了所有前三种 barriers。
如下是两种隐含类型,
- ACQUIRE operations(等同于 LOCK):
- 确保所有在 ACQUIRE 之后的内存操作看起来一定在 ACQUIRE 之后发生。
- 但 ACQUIRE 之前的内存操作也可能在 ACQUIRE 之后发生
- RELEASE operations(等同于 UNLOCK):
- 确保所有在 RELEASE 之前的内存操作看起来一定在 RELEASE 之前发生。
- 但 RELEASE 之后的内存操作也可能在 RELEASE 之前发生
- 与 ACQUIRE 操作结合,就不再需要内存屏障
JMM 的抽象
内存模型(Memory Model)是用于在多处理器环境下定义当前处理器对内存的写入是否对其他处理器可见,以及其他处理器对内存的写入是否对当前处理器可见的充分或必要条件。
不同的 CPU 可能会定义不同的内存模型,通常可以分两类:
强内存模型
支持强内存模型的 CPU (如 x86 系列)通常会持续追踪正在进行中而未完成的内存操作。即强内存模型的 CPU 能够了解他们所定义的内存模型,并可以当某些操作破坏了其内存模型时回滚数据。因此强内存模型的 CPU 设计起来更复杂,但对编码而言更简单。
弱内存模型
支持弱内存模型的 CPU(如 ARM, POWER 等)为其重排 load/store 操作提供了更大的空间。并且在多核环境下更容易改变程序原本的意图。因此这种内存模型的 CPU 设计起来更简单,但对编码要求更高(通常需要更多的插入 Memory Barrier 来纠正 CPU 的行为)。
抽象的内存划分
Java 语言是运行在 JVM 上的语言,因此 JVM 在设计中需要考虑不同平台下 Java 程序执行的一致性。
因此 Java 在语言层面定义了 Java 的内存模型(Java Memory Model),映射为不同线程之间,哪些操作是合法的,以及线程之间如何通过内存来进行交互。从编译器设计的角度看,JMM 定义了一套规则来约束在什么条件下,不允许对 field 或 monitor 的某些操作指令进行重排序。
通过定义一套语言层面的内存模型,无论 JVM 运行在什么平台下,Java 多线程程序的运行结果都是可以预测的。
因此在 JMM 中定义了一些线程间可能会发生的 Actions:
- Read
- Write
- Synchronization actions
- Volatile Read
- Volatile Write
- Lock
- Unlock
- The (synthetic) first and last action of a thread
- Actions that start a thread or detect that a thread has terminated
- External Actions
- Thread divergence actions
同时定义了这些 action 之间的 happens-before 关系:
- unlock happens-before 之后的 lock
- write volatile happens-before 对该 volatile 后续的 read
- 调用线程的
start()happens-before 该线程中任意的操作 - 一个线程的所有操作 happens-before 任何对该线程
join()返回前的其他线程的操作 - 任何对象的默认初始化操作 happens-before 该对象的其他操作
只要两个操作之间满足 happens-before 原则,他们的顺序就是确定的,不会被 reordering,因此就可以说这两个操作之间不存在数据竞争(data race),而当需要满足顺序一致性(sequentially consistent)的操作之间不存在数据竞争时,我们就可以讲这些操作被正确的同步了(correctly synchronized)。
我们对比来看可以发现,实际上满足 happens-before 关系的操作,大多数都属于 Synchronization actions。
所以要满足 happens-before 关系,我们就必须要限制操作之间的 reordering。
限制 Reorderings
在 Doug Lea 的 The JSR-133 Cookbook for Compiler Writers 中,作者将 Volatiles 和 Monitors(管程)与普通操作之间可能会发生重排序的情况做了梳理:
| Can Reorder | 2nd operation | 2nd operation | 2nd operation |
|---|---|---|---|
| 1st operation | Normal Load Normal Store |
Volatile Load MonitorEnter |
Volatile Store MonitorExit |
| Normal Load Normal Store |
No | ||
| Volatile Load MonitorEnter |
No | No | No |
| Volatile Store MonitorExit |
No | No |
单元格中值为 No 的操作,都需要满足 happens-before。
作者又定义了四种 Memory Barriers,并描述了如何使用这四种 Memory Barriers 来实现上表的要求。
- LoadLoad:
- Load1; LoadLoad; Load2
- 使 Load1 的数据在 Load2 及其后所有 Load 操作之前完成装载
- 类似于前文的 Read Barrier
- StoreStore:
- Store1; StoreStore; Store2
- 使 Store1 的数据在 Store2 及其后所有 Store 操作之前完成存储
- 类似于前文的 Write Barrier
- LoadStore:
- Load1; LoadStore; Store2
- 使 Load1 的数据在 Store2 及其后所有 Store 操作之前完成装载
- 类似于前文的 Read + Write Barrier
- StoreLoad:
- Store1; StoreLoad; Load2
- 使 Store1 的数据在 Load2 及其后所有 Load 操作之前完成存储
- 类似于前文的 Write + Read Barrier
与前文 Linux Kernel 中的 Memory Barriers 定义相比,作者的定义其实也只是另一种划分方法,本质还是类似的。
上述 Memory Barriers 与前表的要求对应后,得到:
| Can Reorder | 2nd operation | 2nd operation | 2nd operation | 2nd operation |
|---|---|---|---|---|
| 1st operation | Normal Load | Normal Store | Volatile Load MonitorEnter |
Volatile Store MonitorExit |
| Normal Load |
LoadStore | |||
| Normal Store |
StoreStore | |||
| Volatile Load MonitorEnter |
LoadLoad | LoadStore | LoadLoad | LoadStore |
| Volatile Store MonitorExit |
StoreLoad | StoreStore |
只要遵循上表的要求来插入合适的 Memory Barriers,就能够保证 Volatile 与 Monitor 的 happens-before 要求。可见如下示例:
1 | class X { |
我们发现,在涉及
volatile变量的语句(不论是相同还是不同的的
volatile
变量)之间,其代码顺序就是执行顺序。也就是说编译器和 CPU 都无法打乱
volatile 的顺序。
Memory Order
前面说了那么多内容,其核心有两点:
- 为了 CPU 更高效的运行,设计者采用独立的 Cache、乱序的指令流水线、编译器优化等多种方式来让 CPU 尽量少等待,多执行。但也因此给并发程序的编写带来了诸多麻烦,可能会导致并发程序的执行结果不符合预期。
- 为了应对这种麻烦,设计者又通过 Cache Coherence 协议、Memory Barriers 等技术来尝试解决问题。
伴随着处理器技术的发展,Java 在并发编程的设计上也愈发成熟。从最早的 Monitor 锁,到 volatile 语法,再到更灵活的锁对象以及支持 CAS 操作等等,逐步完善了并发编程的体系。但 Java 的设计者发现,仍然存在许多过度同步的程序(会使程序运行变慢),以及同步不足的程序(会使程序出错),还有些程序会使用与特定的 JVM 或硬件绑定的非标准程序(会使程序变得难以移植)。这些程序的存在让 Java 的设计者考虑引入更多的模型来处理通用的并发编程问题。
所以从 JDK9 开始,引入了几种从弱到强的 Memory Order 来允许程序员更细致的控制程序的同步,它们是:Plain,Opaque,Acquire/Release,Volatile,其中 Plain 与 Volatile 的语义兼容了 JDK9 之前的形式(即普通与 volatile)。
JDK9 中,主要通过 VarHandle 来实现对变量以不同 Memory
Order 来进行访问。
VarHandle
VarHandle的使用比较简单,只需要将其定义为类的一个静态成员,之后就能通过该
VarHandle 来以特定模式访问其他成员变量了:
1 | import java.lang.invoke.MethodHandles; |
如上所示,X 就代表了创建了一个 VarHandle
来实现对成员变量 x 的访问。
Plain
Plain Mode 实际上就是 jdk9 之前对共享变量的常规访问模式。为了四种
Memory Order 的完整性,VarHandle
提供了get()、set() 方法来表示以 Plain
的语义访问变量。
就如果前文所述的,Plain 模式下的指令顺序,除了线程内有依赖关系的语句外,其他都可自由的被重排,例如语句:
1 | d = (a + b) * (c + b); |
从人脑理解角度,可能会被编译为如下机器指令:
1 | 1: load a, r1 |
但实际上编译器完全可以将之编译为可乱序的形式:
1 | load a, r1 | load b, r2 | load c, r4 | load b, r5 |
其中 | 代表了其左右的指令可以任意交换。
Opaque
Opaque 模式提供了比 Plain 稍多一点点的语义限制,即:
先行无环:限定对 Opaque 模式访问的变量先行偏序
1
2
3
4
5
6
7
8X3 = X1 / X2
X5 = X4 * X3
X4 = X0 + X6
// WAR Hazard
// 由于 CPU 的流水线执行,multiply 操作要比 add 操作慢,导致 X4 = X0 + X6 先于前两句执行完成,
// 使得 X5 = X4 * X3 中的 X4 已经不是程序本意想要读取的值了,看起来像是未来的操作影响到了过去(大多数 CPU 中不会出现这种现象)
// Opaque 模式的读写会避免这种乱序一致性:任意对变量的重写操作有序
1
2
3
4
5
6
7int a = 1;
int a = 2;
// 可能会被优化为
int a = 2;
// 在 Opaque 模式下不会被优化行进:写操作最终会可见
1
2
3
4
5
6
7volatile boolean flag = false;
Thread 1 | Thread 2
FLAG.setOpaque(this, true) | while (!FLAG.getOpaque(this)) {};
// 注意,假如 thread-2 以 !FLAG.get(this) 作为条件,while 循环可能会被优化为:
// while (!true) {}; 因为编译器并不知道会有另一个线程来修改 flag位(bitwise)原子性:包括
long、double等 8 Byte 长度的类型以及其他类型,Opaque 模式能够确保对其进行原子的读写。 根据不同的 CPU 实现,单个 load/store 操作有可能会被拆分,例如在处理某些过长类型,或是内存未对齐时。Opaque 能确保 load/store 原子。
Release/Acquire (RA)
RA Mode 代表如下语义:
- 假如读/写操作
A在代码中的位置先于 Release 模式的写操作W,那么在线程内A一定先于W发生。即在线程内任何内存操作都不能被重排到 Release 写之后。 - 假如 Acquire 模式的读操作
R在代码中的位置先于读/写操作A,那么在线程内R一定先于A发生。即在线程内任何内存操作都不能被重排到 Acquire 读之前。
RA 语义的主旨与许多因果一致性(causally consistent)系统是类似的。因果关系在大多数通信形式中必不可少。
举例说明(来源):
“我做了晚餐,之后我告诉你晚餐就绪了,你听到了我的话,所以你能确定存在一份晚餐”。
1 | volatile int ready; // Initially 0, with VarHandle READY |
假如在更弱的模式下, Thread-2 可能会读取到
dinner = 0。
通常我们并不会专门使用一个 ready
信号,而是生产者将数据写入一个引用,之后消费者来读取这个引用:
1 | class Dinner { |
RA 模式的因果关系保证在生产/消费设计、消息传递设计等等很多地方都会用到。但 RA 模式在多个线程写入同一个共享变量的场景下提供足够强的同步保证。RA 模式更多的用于 ownership 模型,即只有 owner 才能写,其他线程只能读。
Volatile
Volatile 模式就是 volatile
修饰的变量的默认读写模式。其语义很简单:
- Volatile 模式的内存访问(读写)是完全有序的(totally ordered)。
1 | volatile int x, y; // initially zero, with VarHandles X and Y |
对于上述代码,假如 M = Volatile,那么 rx 或
ry 一定至少有一个为 1,因为 Volatile
模式确保两个线程内的语句顺序不会改变。
但假如 M = Acquire/Release,则有可能出现
rx == ry == 0,因为在 Thread-1 中
X.setRelease(this, 1);
只保证在其之前的内存操作不会重排到其后,但却不能阻止
int ry = Y.getAcquire(this); 被重排到它之前,Thread-2
亦然。所以可能两个线程执行的第一条语句都是 get 语句,导致
rx == ry == 0。
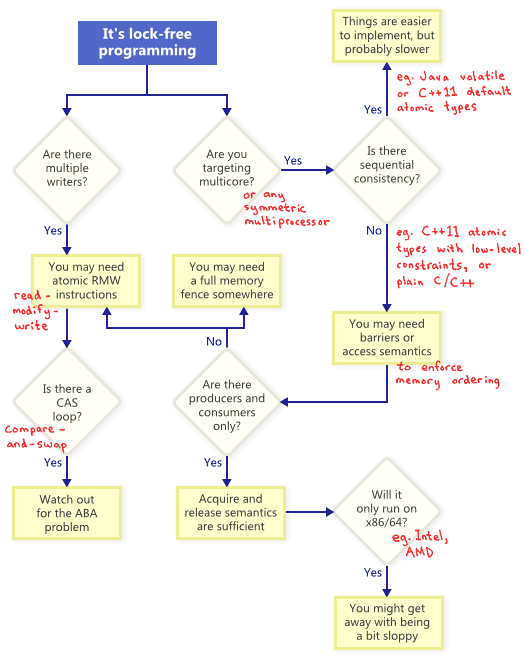
Lock-Free 编程
什么是 lock-free 编程呢?下面这张图诠释的很好(来源):
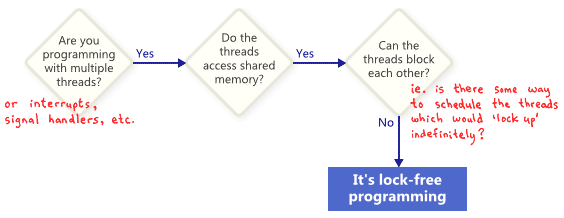
因此对于有对共享内存做交互的多线程程序中,不使用类似互斥量(mutex)这样的技术来阻塞或调度线程的编程技术,就是 lock-free 编程了。
在 lock-free 编程中,会有一些技术点,可见下图:
VarHandle 实现的 lock-free 队列
我们看一看在 jdk 源码中
AbstractQueuedSynchronizer是如何使用 VarHandle
来实现 lock-free 的 CLH 队列的:
1 | /** |
由于在 AQS 中,enqueue 操作可能会由多个线程触发,而 dequeue 操作只有在被唤醒的线程中才会触发,因此不需要额外的同步。
从 enqueue 中我们发现,由于多线程间的竞争,代码中使用了 CAS 来设置
tail。但除此之外我们应该注意到,由于 tail 以及
Node 内部的 next 被定义为 volatile,
因此从开始的 Node oldTail = tail; 到之后的
oldTail.next = node;都能确保所有线程可见,且不会被重排序。
但对于我们新创建的 node,由于其本身还没有发布,因此设置
prev 的时候并不需要 volatile
这么强的语义,所以采用了 Plain 模式。
最后,由于该每个线程对应一个独立的 Node,再加上 GC 环境下,同一地址所指向的一定是同一个对象,因此不再需要考虑 ABA 问题了。
StampedLock 中的 AcquireFence
StampedLock
提供了对资源的无锁读、加锁读和加锁写,用这种方式来降低在普通读写锁读多写少的场景下产生的写“饥饿”的情况。
通常使用 StampedLock
来进行无锁读的使用如下(完整例子源码见 StampedLock jdk11
版类注释):
1 | class Point { |
先通过 tryOptimisticRead 获取当前
stamp,然后直接读数据,之后用 validate(stamp)
来判断当前是否有写操作进行中,如果有则重新尝试读。由于是乐观读,所以并没有加锁,那么对数据的读取与
validarte 之间也就不存在 happens-before
的关系(注意 x, y 并没有被声明为
volatile)。
我们来看看 validate 的源码:
1 | private transient volatile long state; |
我们发现:
- 添加了一个 AcquireFence
state被定义为volatile
回到前面 JMM 的章节我们知道,在 NormalLoad 与 VolatileLoad
之间是不会插入任何 MemoryBarrier 的,因此如果不加
VarHandle.acquireFence();这一句,前面的
double currentX = x; double currentY = y; 很可能被
reordering 到 validate
之后。假如这时有写操作开始写入并修改了 x, y,那么读到的当前
stamp 的值就是错误的。